Application Note CRISPRベースの細胞株開発ワークフローの自動化
- 迅速なスケールアップの加速
- 離席時間の増加
- 一貫した処理
- 冗長な作業の削減
- より良い細胞モニタリング
- ダイナミックなワークフロー・ソリューション
PDF版(英語)
はじめに
プラティウシャクリシュナ・マチャ博士|研究員|モレキュラー・デバイス
製薬業界では、ハイスループットな細胞株開発とより良いスクリーニングに対する要求が高まっており、研究施設や企業は既存のラボの自動化を進めている。ロボット工学は約40年前から一部のラボで導入されていたが、現在ではより一般的になり、離席時間を増やすことで研究者を反復作業から解放するのに役立っている。単純なアッセイから複雑なアッセイまで自動化することで、サンプルハンドリング、遠心分離、ラックへの移動、リキッドハンドリングといった熟練を要しないステップの作業負荷を軽減することができる。ロボット工学の新たなトレンドにより、私たちは、より優れた、より小型の、そしてプログラムしやすいロボットを手に入れ、統合ロボット工学ソリューションに簡単に組み込むことができるようになった1,2。
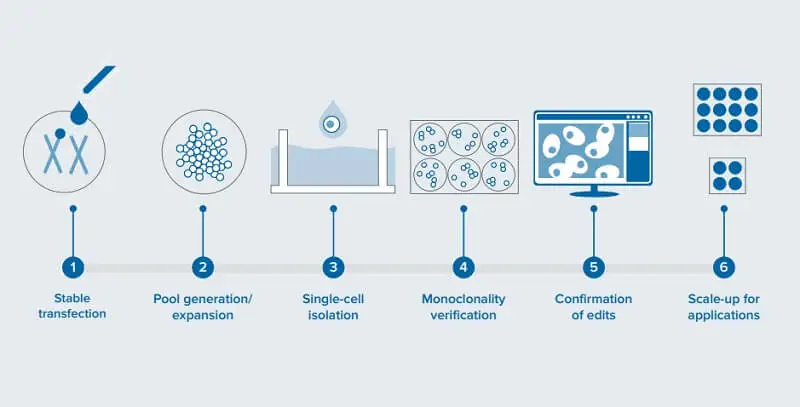
一般的な細胞株開発では、何万ものクローンをスクリーニングして、多量の生物産物を産生する最良の安定細胞を見つける必要がある。ここでは、哺乳類細胞株開発ワークフローの自動化-トランスフェクションされた細胞の編集、単クローン性、増殖評価のための自動化された統合スクリーニング-について述べる(図1)。このシステムには、シングル・セル分注装置からモノクローナル細胞のスクリーニング、更なるバリデーション・アッセイのための展開まで、全てのステップを実行する複数の機器と協働ロボットが含まれている。この統合システムは、低スループットから高スループットへとスループットを向上させるだけでなく、一貫性を高めることで人為的ミスを排除する。セルは可能な限り最良の状態に維持され、週末も監視されるため、生産期間が大幅に短縮され、より迅速なスケーラビリティが可能になります。この自動ワークセル・ソリューションには、図1のインストゥルメンテーションがすべて含まれている。さらに、アッセイの要件や複雑さに応じて、他のインストゥルメンテーションを簡単に追加することもできる3,6。
ケーススタディ
CRISPR編集細胞株の単クローン性の自動スクリーニング
この統合システムには、単一細胞プリンター、クローンセレクトイメージャー-蛍光(CSI-FL)、リキッドハンドラー、自動インキュベーター、ホテル、バーコードリーダー、およびロボットなどが含まれていた。このシステムを用いて、トランスフェクトされた細胞は96ウェルプレートと384ウェルプレートにプリントされ、0日目の単クローン性評価のためにイメージングされ、成長のために定期的にモニターされた。これらのツールを用いた複雑なワークフローは、遺伝子編集アッセイのスループットと自動化を向上させ、細胞の単クローン性をスクリーニングし、エンドポイントアッセイを実行した。このソリューションはセルだけでなく、様々な用途のCRISPR編集オルガノイドの開発にも応用できる(図1)
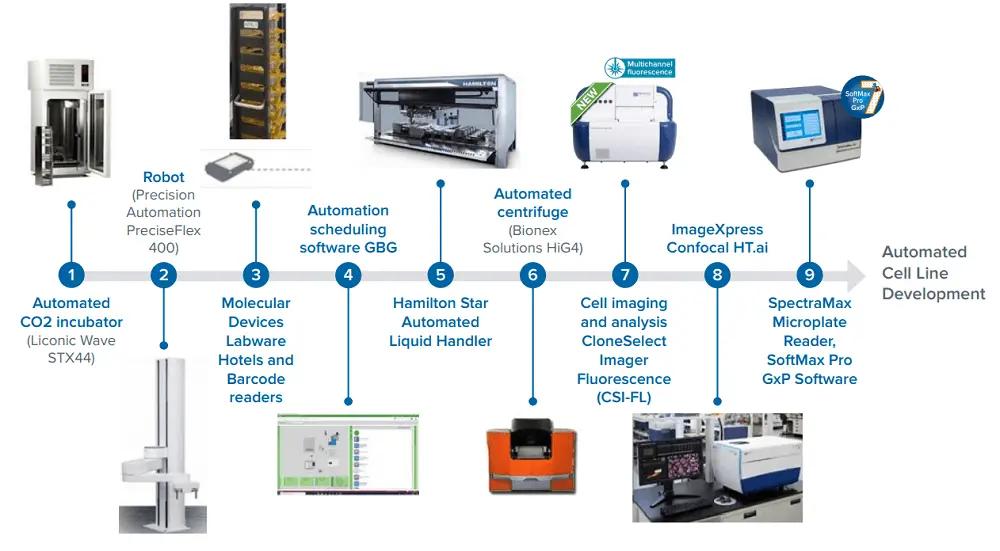
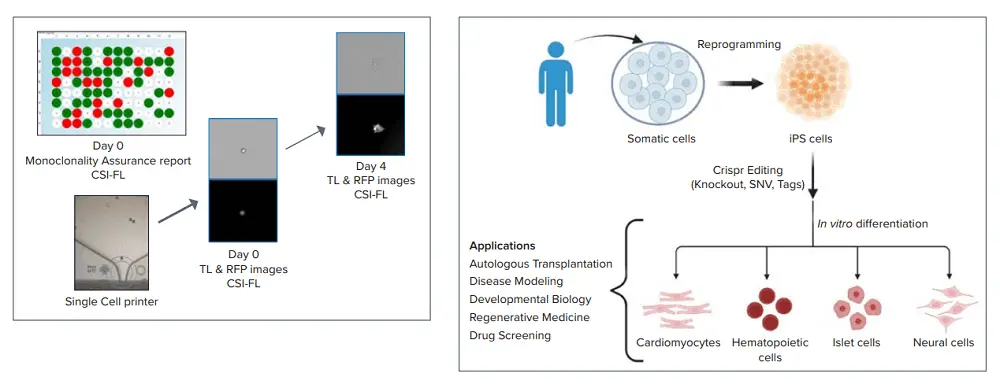
図1. CRISPR編集細胞/器官スクリーニング-疾患モデリングのための細胞株開発と統合自動化システムに関わるワークフロー・ステップ。様々なステップの様々なインストゥルメンテーションと自動化を含む:スクリーニング、および細胞単クローン性のモニタリングが最も重要であり(CSI-FLによって実行される)、応用の可能性がある。
自動ラボラトメーション・スケジューリングソフトウェア(GBG、図2)を用いて、インストゥルメンテーションの操作を事前にスケジュールし、ワークフローのステップを実行した。細胞のCRISPR編集とメンテナンスは、リキッドハンドラーとインキュベーターを用いて行った。その後、これらの細胞はモノクローナル細胞株開発のためにマルチウェルプレートにシングルセル分注装置された。これらのマルチウェルプレートを0日目にイメージングし、その後CSI-FLを用いて14日目までイメージングし(図3および図4)、0日目のモノクローナリティ保証レポート(図1)を作成し、すべての細胞の成長をモニターした。細胞は電子的に追跡され、モニタリングパラメーターはプレーティングデータに保存された:細胞のコンフルエンス、細胞数の推定値、成長曲線。このインストゥルメンテーションは、CHO、HEK、ハイブリドーマ、IPSCなど、多様な細胞種を含む接着細胞や沈降懸濁細胞タイプに対応し、客観的かつ定量的に細胞増殖を評価する。ここでは、p53 KO用のCRISPRプラスミド(Santa Cruz Bio社製)を用いて、トランスフェクションによる接着性モノクローナルHEK-293細胞株を開発した。この細胞株はさらに、編集検証のためのエンドポイントアッセイに供された[引用アプリ注:7-9参照]。
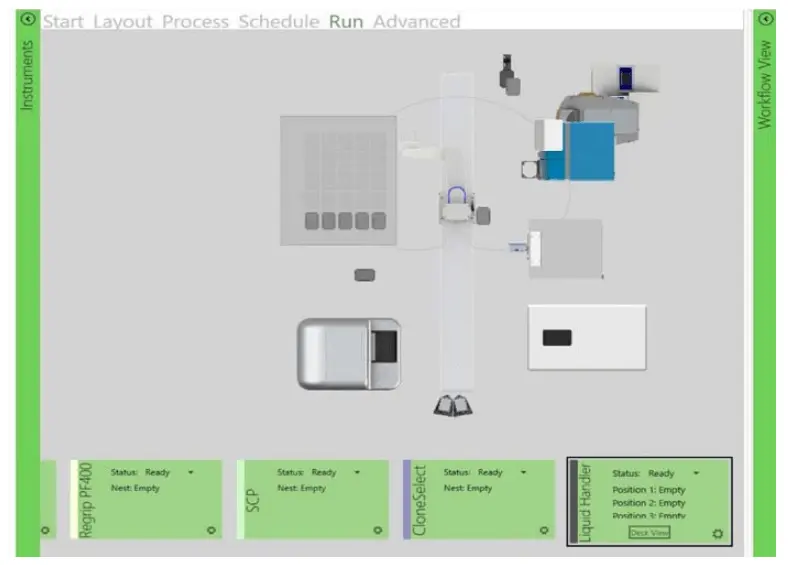
図2. この仮想プラットフォームには、CSI-FL、自動インキュベーター、リキッドハンドラー、ホテル、バーコードリーダーが示されている。これらのインストゥルメンテーションは、自動ワークフローを実行するためのワークステーション上の完全仮想環境(GBG)上で行われる。機器はリアルタイムでモニターされ、ワークフローの必要性に基づいてシステムから追加されたり、削除されたりしている。
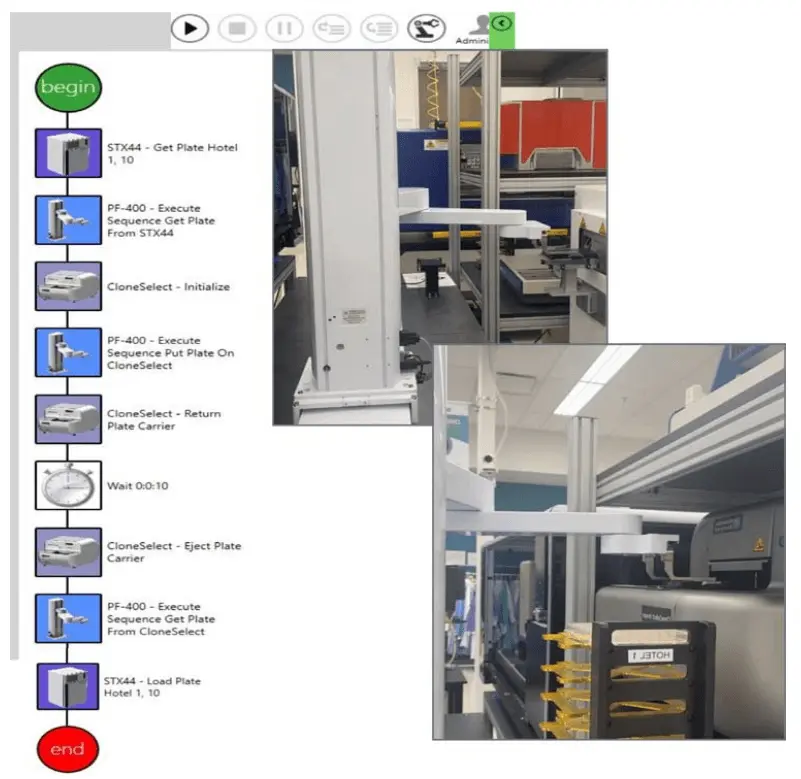
図3. この一連のステップは、96ウェルプレートにプリントされた単一細胞をイメージングするために、自動化ソフトウェア(GBG、左)でデザインされた。インキュベーター → イメージャー → インキュベーター。右上の画像は、協働ロボットが96ウェルプレートをピッキングしているところ、右下の画像は、ロボットがプレートをCSI-FLにプレーティングしているところ。
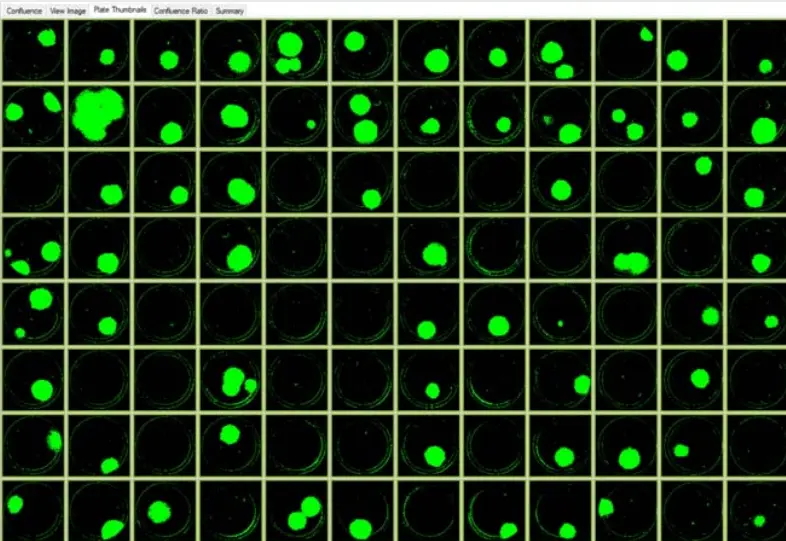
図4. RFPマーカーを持つCRISPR編集細胞のコロニー。この96ウェルCostar 3300プレートのプレートレイアウト画像は、9日目の細胞をCSI-FLを用いて4倍で取得した。
まとめ
自動化されたインストゥルメンテーションとCSI-FLにより、編集された細胞は、非常に簡単に、数週間の離席時間で、単クローン性のイメージングと追跡ができるようになった。スループット、信頼性、コンタミネーションの可能性は劇的に変化した。高品質のCRISPR編集細胞株が得られ、エンドポイントアッセイに使用された。細胞株開発のタイムライン短縮と自動化ソリューションへの需要がますます高まる中、当社はCSI-FLによる自動化統合システムワークフローを提供している。
参考文献
- Lindgren, Kristina, et al. “Automation of cell line development.” Cytotechnology 59.1 (2009): 1-10
- F. Mirasol, “The Role of Automation in Cell-Line Development,” BioPharm International 32 (1) 2019.
- Felder, RA, Boyd, JC, Savory, J, Margrey, K, Martinez, A, Vaughn, D. Robotics in the clinical laboratory. Rev Clin Lab Med 1988; 8:699–711. https://doi.org/10.1016/s0272-2712(18)30657-7.Search in Google Scholar
- Wheeler, MJ. Overview on robotics in the laboratory. Ann Clin Biochem 2007; 44:209–18. https://doi.org/10.1258/000456307780480873.Search in Google Scholar
- Lippi, G, Da Rin, G. Advantages, and limitations of total laboratory automation: a personal overview. Clin Chem Lab Med 2019; 57:802–11. https://doi.org/10.1515/cclm-2018-1323.Search in Google Scholar
- Chapman, T. Lab automation and robotics: Automation on the move. Nature 421, 661–663 (2003). https://doi.org/10.1038/421661a
- Accelerating gene edited cell lines with the CloneSelect Imager FL, Molecular Devices.
- CloneSelect Imager FL fluorescent imaging for rapid day zero monoclonality assurance, Molecular Devices.
- What is Gene Editing, CRISPR Engineering, CRISPR/Cas9 | Molecular Devices
PDF版(英語)